VVVF車の力行
誘導電動機の回転速度は、周波数にほぼ比例します。しかし、周波数のみを上昇させると、モータの交流抵抗が上昇し、電流が減っていってしまいます。概要で説明した通り、電流が減るとトルクが減ってしまい、加速度を維持することができません。そこで、定トルク領域では、周波数と電圧の双方を同時に変化させます。これにより、モータに流れる電流を一定にすることができます。これが、可変電圧可変周波数制御(VVVF)と呼ばれる所以です。
図1の例では、発車直後から電圧と周波数が上昇を続け、約38km/hで電圧が最大となります。
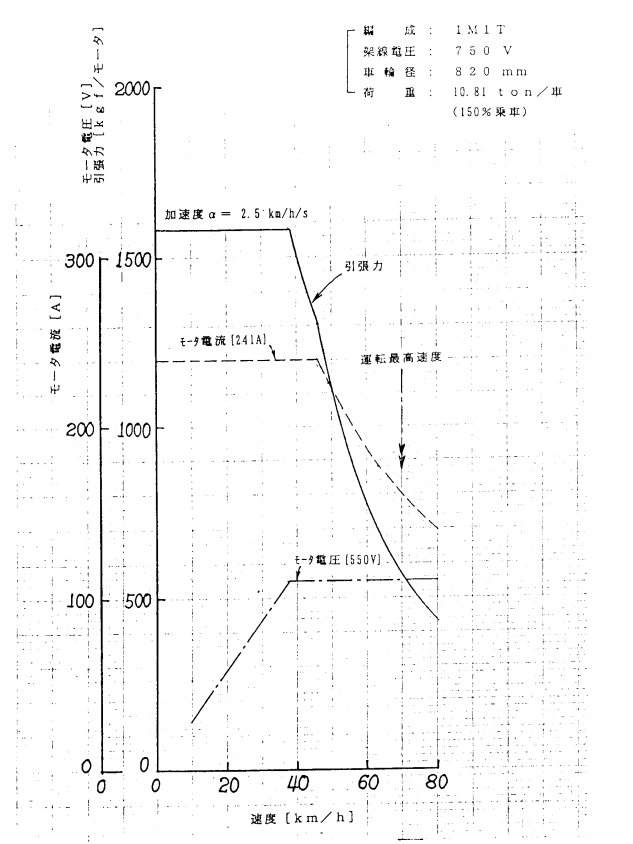
電圧が最大になると、周波数を上昇させても電流を維持することができなくなります。
そこで、すべり周波数を引き上げる制御を行います。すべりとは、磁界の回転速度(同期速度)と、回転子の回転速度との差を比率で表したもので、これに電源周波数を乗じたものをすべり周波数と呼びます。
この制御中は、電流・電圧ともに一定になるため、定出力域となります。図6-1の例では、約46km/hまで電流が維持されています。
なお、車両によっては、条件(設定加速度、乗車率等)によってすべり周波数を変更しています。
すべり周波数が最大に達すると、電流が減少していきます。すなわち、特性域となります。
ノッチ曲線の読み方
誘導電動機は、同じ電流であっても周波数によってトルクが変化するため、周波数ごとに引張力が記載されている場合があります。ここでは、図2を例に読み方を説明します。
まず、速度-電流カーブに着目します。例えば、加速度=3.3で、100%乗車の場合、すべり周波数は2.14Hzで、電流は150A弱となります。
このまま加速すると、34km/hで周波数は48Hz、3ノッチの場合はここから電流が落ちていきます。4ノッチの場合、ここからすべり周波数が3.8Hzまで上昇、56km/hで周波数は80Hzとなります。
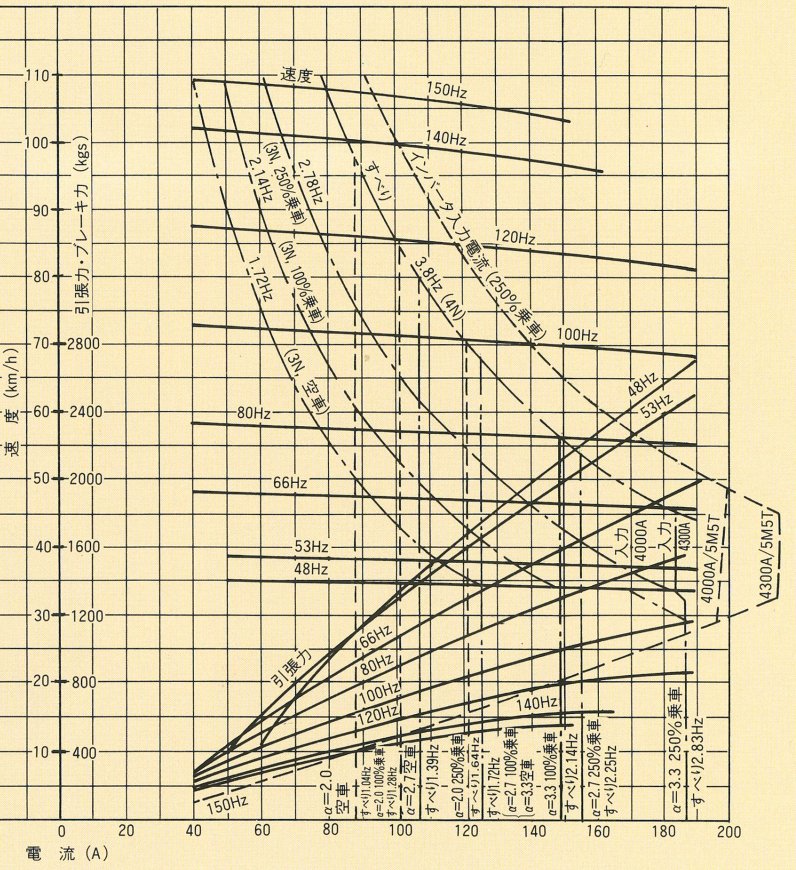
図の下部に、周波数ごとの電流-引張力カーブが記載されているため、ここを参照すると、各速度における引張力を求めることができます。ここでは、34km/h→56km/hで、周波数は48→80Hzに変わるため、引張力は約2100kgfから約1300kgfまで低下します。
56km/hを超えると、速度-電流カーブに従って電流が低下していき、同時に周波数が上昇していきます。よって、電流値と周波数によって引張力カーブをプロットすれば、各速度における引張力を求めることができます。